






Ильдар Бегишев, 04/02/21
Распоряжением Правительства Российской Федерации от 19 августа 2020 г. No 2129-р была утверждена Концепция развития регулирования отношений в сфере технологий искусственного интеллекта и робототехники до 2024 года1 (далее – Концепция). Этот документ представляет собой комплекс правовых перспектив, а также определяет направления работы в рамках создания многоаспектной правовой платформы в области робототехники и искусственного интеллекта.
Автор: Ильдар Бегишев, старший научный сотрудник Казанского инновационного университета им. В.Г. Тимирясова (ИЭУП), кандидат юридических наук
Отсутствие однозначного понимания содержания таких терминов, как "искусственный интеллект", "робот", "умный робот", "робототехника", "интеллектуальный агент" и т.д., приводит к терминологическим проблемам при формировании регулирования.
Учитывая прикладной характер применения этих технологий в самых разных областях, будет необходимо формулирование разных определений в зависимости от отрасли применения технологий искусственного интеллекта и робототехники. По этой причине в рассматриваемый в Концепции временной период предлагается по возможности избегать внедрения в законодательство Российской Федерации единого для всех отраслей нормативного определения указанных терминов. При этом крайне важно в данный период провести работу по построению и гармонизации онтологии предметной области силами экспертного сообщества и профильных технических комитетов при Федеральном агентстве по техническому регулированию и метрологии. Там, где это необходимо для целей определения предмета регулирования конкретных нормативных правовых актов, предлагается использовать определения, содержащиеся в документах по стандартизации, либо давать определения, актуальные для конкретной сферы регулирования.
Все это в равной степени относится и к понятию "киберфизическая система".
В современных условиях степень интеграции человека и машины достаточно высока, и этот процесс, по мнению ряда специалистов, находится лишь в начальной стадии. Следствием указанной интеграции выступает появление так называемых киберфизических систем (далее – КФС). При этом КФС интегрируют кибернетическое начало, компьютерные аппаратные и программные технологии, качественно новые исполнительные механизмы, встроенные в окружающую их среду и способные воспринимать ее изменения, реагировать на них, самообучаться и адаптироваться. Ключевая идея таких систем – интеграция физического и информационного пространства2. Способность воспринимать окружающую среду и адаптироваться к ней – еще одна особенность КФС.
История происхождения самого термина КФС вызывает споры среди исследователей. Есть мнение, что первыми данное понятие ввели немецкие специалисты. Другие авторы считают, что термин КФС родом из США: уже в 1948 г. Н. Винер ввел в обиход термин "кибернетика", который и лег в основу последующего понятия – КФС.
Подходы к определению КФС также имеют различную природу. По мнению специалистов Национального института стандартов и технологий США, КФС – это умные системы, охватывающие вычислительные и эффективно интегрируемые физические компоненты, тесно взаимодействующие между собой3. Также итогом еще одного исследования стало обоснование наличия у подобной системы следующих важных характеристик:
- это гибридная система, поскольку в ее рамках происходит интеграция вычислений с физическими процессами;
- КФС объединяет вычислительные и коммуникационные возможности с мониторингом и контролем объектов в физическом мире;
- она состоит из физических объектов, датчиков (сенсоры и приводы) и информационных систем4.
Одним из самых распространенных определений КФС выступает формулировка, предлагаемая в Википедии. Она звучит следующим образом: "Киберфизическая система (англ. cyber-physical system) – информационно-технологическая концепция, подразумевающая интеграцию вычислительных ресурсов в физические процессы. В такой системе датчики, оборудование и информационные системы соединены на протяжении всей цепочки создания стоимости, выходящей за рамки одного предприятия или бизнеса. Эти системы взаимодействуют друг с другом с помощью стандартных интернет-протоколов для прогнозирования, самонастройки и адаптации к изменениям"5.
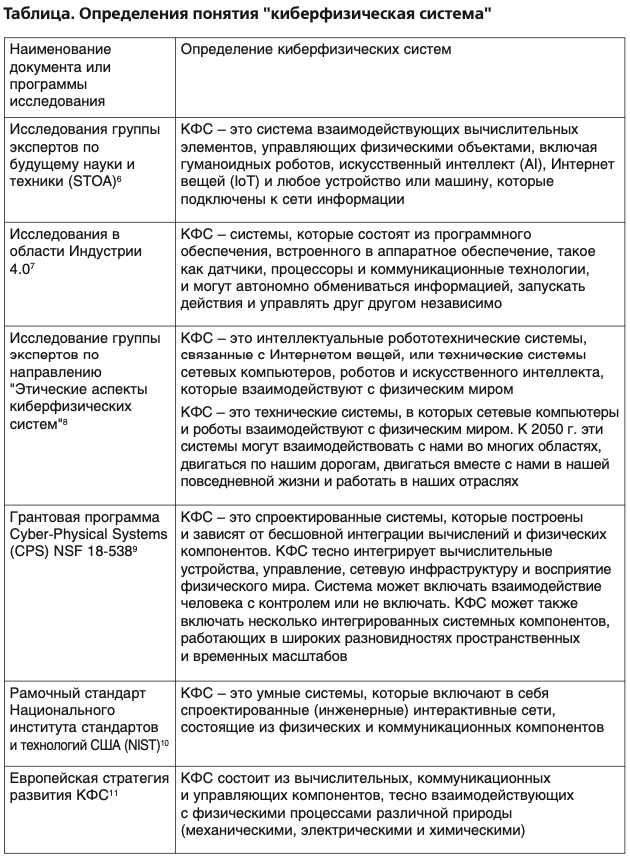
Учитывая саму природу термина КФС, необходимо в первую очередь рассмотреть определения КФС, закрепленные в ряде зарубежных стандартов, нормативно-правовых документах, а также в исследованиях в рамках государственного финансирования (см. табл.).
Отечественные специалисты отмечают, что сфера создания и использования КФС включает целый ряд понятий, определение которых является принципиально важным для проведения в ней исследований. Наиболее часто в оборот включаются такие категории, как "робот", "искусственный интеллект", "киберфизическая система12. Однако значительный разброс мнений в области понимания связанных понятий приводит к сложностям, касающимся различий в понимании той или иной категории. Например, в рамках непосредственно киберфизической системы могут сочетаться такие понятия, как "робот" и "робототехника", "разумный робот" и пр. Кроме того, эти понятия могут выступать как автономные сущности13. Сложности в их трактовке также связаны с тем, что каждый из терминов имеет свое специфическое толкование применительно к разным областям исследований или даже отраслям права14. Именно поэтому можно сделать вывод, что единое легальное определение КФС на сегодняшний день, отсутствует.
Другие ученые понимают КФС как интеграцию таких трех элементов, как физические объекты, программное обеспечение, коммуникационные сети. При этом автономность не является обязательной характеристикой КФС15.
В зарубежных исследованиях присутствует также термин "биокиберфизическая система", которая включает в себя одновременно и биологический, и физический компонент16. Биологическое начало данной системы позволит многократно повысить уровень взаимопонимания и взаимодействия человека и такой системы, поскольку она будет ближе человеку по своей природе. В отличие от киберфизических, кибербиологические системы предполагают взаимосвязь биологического элемента, программного обеспечения и коммуникационных сетей17.
Существует также мнение, что КФС необходимо исследовать с позиции смешанного подхода, предполагающего одновременное изучение взаимодействия физических процессов, программного обеспечения и сетей. В качестве вызова для исследователей киберфизической системы является синхронизация времени событий, происходящих в реальном мире, с временем событий в виртуальном пространстве18.
Исследователями А.В. Незнамовым и Б.У. Смитом под киберфизической системой понимается программно-аппаратный комплекс, способный действовать в физической среде и воздействовать на нее19. Соответственно, КФС здесь представлена как активный участник общественных отношений.
Таким образом, можно заключить, что киберфизическая система – это интеллектуальная система, образованная взаимодействием вычислительного источника и физического объекта в киберпространстве.
Список литературы:
- Черняк Л. Киберфизические системы на старте. URL: https://www.osp.ru/os/2014/02/13040038
- Jeschke S., Brecher C., Meisen T., zdemir D., Eschert T. (2017) Industrial Internet of Things and Cyber Manufacturing Systems. In: Jeschke S., Brecher C., Song H., Rawat D. (eds) Industrial Internet of Things. Springer Series in Wireless Technology. Springer, Cham.
- Security and Privacy in Cyber-Physical Systems. Foundations, Principles, and Applications / ed. by H. Song, G. A. Fink, S. Jeschke. New Jersey: John Wiley & Sons Ltd, 2018. 472 p.
- Архипов В.В, Бакуменко В.В., Волынец А.Д., Наумов В.Б., Незнамов А.В., Побрызгаева Е.П., Сарбаш С.В., Смирнова К.М., Тытюк Е.В. Регулирование робототехники: введение в "робоправо". Правовые аспекты развития робототехники и технологий искусственного интеллекта / Под ред. А.В. Незнамова. Инфотропик Медиа, 2018. 232 с.
- Незнамов А.В., Наумов В.Б. Стратегия регулирования робототехники и киберфизических систем // Закон. 2018. No 2. С. 69–89.
- Кутейников Д.Л., Ижаев О.А., Зенин С.С., Лебедев В.А. Киберфизические, кибербиологические и искусственные когнитивные системы: сущность и юридические свойства // Российское право: образование, практика, наука. 2019. No 3. С. 75–81.
- Fass D., Gechter F. Towards a Theory for Bio-Cyber Physical Systems Modelling // Digital Human Modeling. Applications in Health, Safety, Ergonomics and Risk Management: Human Modeling. 6th International Conference, DHM 2015, (Los Angeles, August 2-7, 2015) / ed. by V. G. Duffy. N. Y.: Springer, 2015. Pt 1. P. 248.
- Незнамов А.В., Смит Б.У. Робот не виноват! Взгляд из России и США на проблему ответственности за вред, причиненный роботами // Закон. 2019. No 5. С. 135–156.
Сноски
- Об утверждении Концепции развития регулирования отношений в сфере технологий искусственного интеллекта и робототехники на период до 2024 г.: распоряжение Правительства Российской Федерации от 19 августа 2020 г. No 2129-р // Собрание законодательства Российской Федерации. 2020. No 35. Ст. 5593.
- Черняк Л. Киберфизические системы на старте. URL: https://www.osp.ru/os/2014/02/13040038
- Cyber-Physical Systems. URL: https://nist.gov/el/cyber-physical-systems
- Киберфизические системы. URL: http://internetofthings.ru
- Киберфизическая система. URL: https://ru.wikipedia.org
- Jeschke S., Brecher C., Meisen T., zdemir D., Eschert T. (2017) Industrial Internet of Things and Cyber Manufacturing Systems. In: Jeschke S., Brecher C., Song H., Rawat D. (eds) Industrial Internet of Things. Springer Series in Wireless Technology. Springer, Cham.
- European Parliament. Panel for the Future of Science and Technology (STOA). URL: https://www.europarl.europa.eu/stoa/en/home/highlights
- Ethical Aspects of Cyber-Physical Systems. URL: http://www.europarl.europa.eu
- Cyber-Physical Systems. Program solicitation NSF 18-538. URL: https://www.nsf.gov
- Framework for Cyber-Physical Systems Release 1.0. URL: https://www.nist.gov
- Security and Privacy in Cyber-Physical Systems. Foundations, Principles, and Applications / ed. by H. Song, G. A. Fink, S. Jeschke. New Jersey: John Wiley & Sons Ltd, 2018. 472 p.
- Архипов В.В, Бакуменко В.В., Волынец А.Д., Наумов В.Б., Незнамов А.В., Побрызгаева Е.П., Сарбаш С.В., Смирнова К.М., Тытюк Е.В. Регулирование робототехники: введение в "робоправо". Правовые аспекты развития робототехники и технологий искусственного интеллекта / Под ред. А.В. Незнамова. Инфотропик Медиа, 2018. 232 с.
- Незнамов А.В., Наумов В.Б. Стратегия регулирования робототехники и киберфизических систем // Закон. 2018. No 2. С. 69–89.
- Архипов В.В, Бакуменко В.В., Волынец А.Д., Наумов В.Б., Незнамов А.В., Побрызгаева Е.П., Сарбаш С.В., Смирнова К.М., Тытюк Е.В. Регулирование робототехники: введение в "робоправо". Правовые аспекты развития робототехники и технологий искусственного интеллекта / Под ред. А.В. Незнамова. Инфотропик Медиа, 2018. 232 с.
- Кутейников Д.Л., Ижаев О.А., Зенин С.С., Лебедев В.А. Киберфизические, кибербиологические и искусственные когнитивные системы: сущность и юридические свойства // Российское право: образование, практика, наука. 2019. No 3. С. 75–81.
- Fass D., Gechter F. Towards a Theory for Bio-Cyber Physical Systems Modelling // Digital Human Modeling. Applications in Health, Safety, Ergonomics and Risk Management: Human Modeling. 6th International Conference, DHM 2015, (Los Angeles, August 2–7, 2015) / ed. by V. G. Duffy. N. Y.: Springer, 2015. Pt 1. P. 248.
- Fass D., Gechter F. Towards a Theory for Bio-Cyber Physical Systems Modelling // Digital Human Modeling. Applications in Health, Safety, Ergonomics and Risk Management: Human Modeling. 6th International Conference, DHM 2015, (Los Angeles, August 2–7, 2015) / ed. by V. G. Duffy. N. Y.: Springer, 2015. Pt 1. P. 248.
- Fass D., Gechter F. Towards a Theory for Bio-Cyber Physical Systems Modelling // Digital Human Modeling. Applications in Health, Safety, Ergonomics and Risk Management: Human Modeling. 6th International Conference, DHM 2015, (Los Angeles, August 2–7, 2015) / ed. by V. G. Duffy. N. Y.: Springer, 2015. Pt 1. P. 248.
- А.В. Незнамов, Б.У. Смит Робот не виноват! Взгляд из России и США на проблему ответственности за вред, причиненный роботами // Закон. 2019. No 5. С. 135–156.








